学習システムは、飛行体が自ら飛行する意思を初期設定することからはじめ、離陸・ホバリング・移動・着陸に関わりなく、安定し、安心できる飛行を行うことを目的に、運動パターン記憶を形成する。この学習スキームでは、飛行体は当初、飛行の意思をもちつつも、どのような制御をすべきかの知識はもたない。したがって、運動ニューロンの自発発火と近傍抑制からwinner take allによって、ランダムに運動ニューロンが選択され行動がとられる。行動の結果、飛行体の挙動が不安定の場合、飛行意思を抑制し、着陸する。ある程度安定に飛べた場合、その安定化を生み出した状況と運動の履歴をベースに記憶を形成する。また、飛行すると、環境内に飛行体との関わりを強く持つ目標物を発見できるので、その目標物との関係を良好にたもてない場合、やはり、試行錯誤的に行動を行い、良好とする記憶の形成を行う
(ホンダリサーチインスティチュート辻野広司)
→詳細はこちら
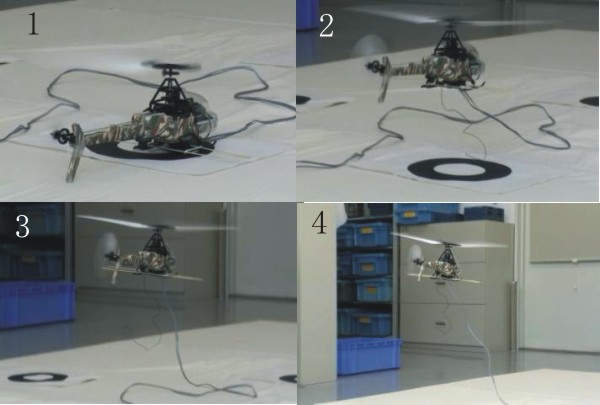 ヘリコプタ飛行写真
ヘリコプタ飛行写真